方向导数和梯度
发布于 2023/05/21 更新于 2023/05/21
作者 趣宽科技 码云上的源文件
码云上的源文件
在训练机器学习模型时,对权重和偏差进行初始猜测,然后反复调整这些猜测,直到获得损失可能最低的权重和偏差为止。而梯度下降(Gradient descent)是机器学习中最常用的计算代价函数的方法,它是一个一阶最佳化算法,使用梯度算法法可以找到一个函数向下或向上变化最快的方向,从而获取函数的局部极值。在了解梯度前,先介绍一下导数。

我们将这个差商的极限称为函数\(y=f(x)\)在点\(x\)处的导数,通常使用拉格朗日(Lagrange)表示法\(y\,'=f'(x)\)来表示导数,也使用莱布尼兹所用的符号\(\frac{dy}{dx}, \frac{df(x)}{dx}或(\frac{d}{dx})(fx)\)。
导数表现形式可以是:
$$
f\,'(x) = \lim\limits_{x_1 \to x}\frac{f(x_1) - f(x)}{x_1-x}=\lim\limits_{h \to 0}\frac{f(x + h)-f(x)}{h}
$$
$$
\frac{dy}{dx}=\frac{df(x)}{dx}=f\,'(x)=\lim\limits_{x_1 \to x}\frac{f(x_1)-f(x)}{x_1-x}=\lim\limits_{\Delta x \to 0}\frac{\Delta y}{\Delta x}
$$
我们将比值\(\frac{\Delta y}{\Delta x}\)称为在区间\([x, x+\Delta x]\)上\(y对于\)\(x\)的”平均变化率“。而极限\(f\,'(x) = \frac{dy}{dx}\)则表示\(y\)对于\(x\)的”瞬时变化率“,或简称”变化率“。
一元函数在平面直角坐标系中可表示为线段,因此求导数相当于求某点处切线的斜率。而多元函数在三维空间中可表示为一个曲面,在多元函数中,除了一个自变量之外,我们指定所有其他自变量以确定的值,而只允许那一个自变量,譬如\(x\)变动,这函数就变成一个一元函数。我们来研究两个自变量\(x\)和\(y\)的一个函数\(u=f(x,y)\),并指定\(y\)以一个确定的固定值\(y=y_0=c\)。得出函数\(f(x, y_0)\)为单独一个变量\(x\)的函数,它可以几何地说成是用平面\(y=y_0\)取切割曲面\(u=f(x,y)\)。这样形成的平面上的交线可以用方程\(u=f(x, y_0)\)表示。如果我们对这个方程用普通方法在点\(x=x_0\)上求导,假设\(f\)在领域\((x_0, y_0)\)的领域有定义,且导数存在,我们就得到\(f(x,y)\)在点\((x_0, y_0)\)处关于\(x\)的偏导数。
$$
\lim_{h \to 0}\frac{f(x_0+h, y_0) - f(x_0, y_0)}{h}
$$
几何上看,这个偏导数表示\(x\)轴的一条平行线与曲线\(u=f(x, y_0)\)的切线之间的夹角的正切。所以它是曲面\(u=f(x,y)\)在\(x\)轴方向的斜率。为了表示偏导数,常用几种不同的符号,其中一种是
$$
\lim_{h \to 0}\frac{f(x_0+h, y_0) - f(x_0, y_0)}{h}=f_x(x_0, y_0)=u_x(x_0, y_0)
$$
如果我们希望强调偏导数是一种差商的极限,我们可以把它表示成
$$
\frac{\partial f}{\partial x}或\frac{\partial}{\partial x}f.
$$
这里我们用一个特别的圆形字幕\(\partial\)代替在一元函数微分法中常用的\(d\),这为了表示我们处理的是多元函数,而对其他自变量的求导,使用完全相同的方式,我们用下面的关系式来定义\(f(x,y)\)在点\(f(x_0, y_0)\)对\(y\)的偏导数:
$$
\lim_{h \to 0}\frac{f(x_0, y_0 + h) - f(x_0, y_0)}{h}=f_y(x_0, y_0)=D_yf(x_0, y_0)
$$
因此,当我们对其中一个自变量求导时,把其他的变量看作常量。求两个导数
$$
U_x(x,y)=f_x(x,y)=\frac{\partial f(x,y)}{\partial x}.
$$
$$
U_y(x,y)=f_y(x,y)=\frac{\partial f(x,y)}{\partial y}.
$$
偏导数本身都是\((x,y)\)的函数。举例来说,函数\(u=x^2+y^2\)具有偏导数\(u_x = 2x\)(对\(x\)求导时,把\(y^2\)看作常数,因而导数为0)和\(u_y=2y\)。函数\(u=x^3y\)的偏导数是\(u_x=3x^2y\)和\(u_y=x^3\)
类似地,对于任何\(n\)个自变量的一个函数\(f(x_1, x_2, \cdots,x_n)\),我们定义它关于\(x_1\)的偏导数为
$$
\frac{\partial f(x_1, x_2, \cdots, x_n)}{\partial x_1} = \lim_{h \to 0} \frac{f(x_1+h, x_2, \cdots, x_n) - f(x_1, x_2, \cdots, x_n)}{h}
$$
$$
=f_{x_1}(x_1, x_2,\cdots, x_n)=D_{x_1}f(x_1, x_2, \cdots, x_n),
$$


如果函数\(z=f(x,y)\)在点\(P(x,y)\)处可微分,则该函数在该点沿任意一方向的\(l\)的方向导数都存在,并且
$$
\frac{\partial f}{\partial l } = \frac{\partial f}{\partial x}\cos \alpha + \frac{\partial f}{\partial y}\sin \alpha \quad l=(\cos \alpha, \sin \alpha)
$$
方向导数是曲面\(u=f(x,y)\)在点\((x,y)\)处沿方向向量\((\cos\alpha, \sin \alpha)\)的倾斜程度(坡度)
上述的公式可记作
$$
\frac{\partial f}{\partial l } = \frac{\partial f}{\partial x}\cos \alpha + \frac{\partial f}{\partial y}\cos \beta
$$
$$
\frac{\partial f}{\partial l } = \{ \frac{\partial f}{\partial x}, \frac{\partial f}{\partial y} \} \cdot \{ \cos \alpha, \cos \beta \}
$$
$$
=\text{grad}f \cdot \vec{l^{\circ}}
$$
\(\text{grad}f\)是梯度,如果\(\vec{l}\)不是单位向量,就把它单位化(向量中各个元素比上自己的模)
$$
=\text{grad}f \cdot \frac{\vec{l}}{|\vec{l}|}
$$
三元函数\(u=f(x,y,z)\)在点\((x,y,z)\)沿方向\(\vec{l}=\{\cos \alpha, \cos \beta, \cos \gamma\}\)的方向导数:
$$
\frac{\partial f}{\partial l} = \frac{\partial f}{\partial x}\cos\alpha + \frac{\partial f}{\partial y}\cos\beta + \frac{\partial f}{\partial z}\cos\gamma
$$
梯度是讨论函数变化最快的方向
$$
\frac{\partial f}{\partial l} = \Big\{\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}\Big\} \cdot \Big\{\cos \alpha, \cos \beta\Big\}
$$
$$
=\text{grad}f \cdot \vec{l^{\circ}}=\text{grad}f \cdot \frac{\vec{l}}{|\vec{l}|}
$$
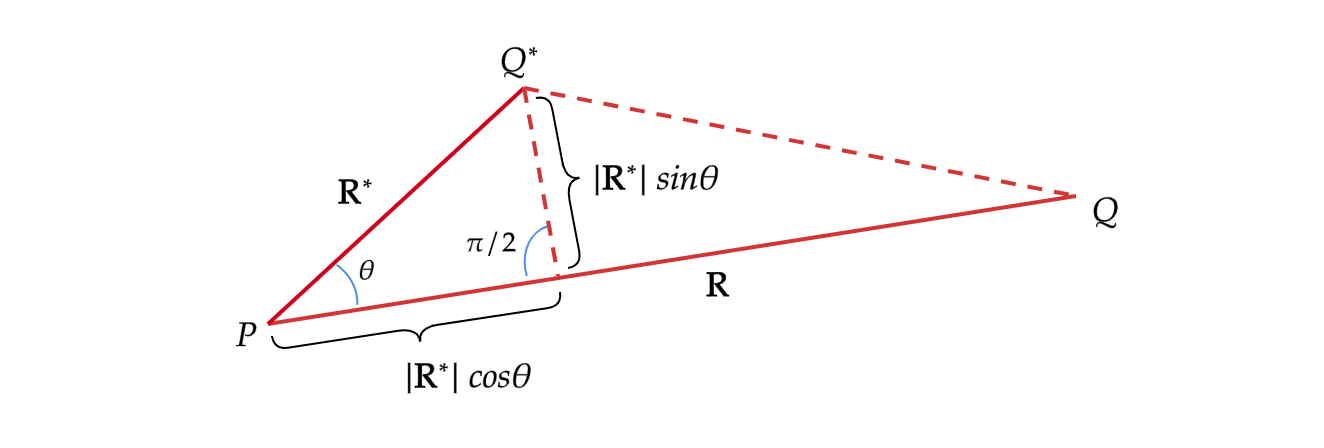
表示函数\(f\)沿方向向量\(l\)的方向导数,在几何上,方向导数是曲面\(u=f(x,y)\)在点\((x,y)\)处沿方向向量\(l=(\cos\alpha, \sin \alpha)\)的倾斜程度(也叫坡度)。令\(\textbf{R}\)和\(\textbf{R}^*\)有同一个起点,\(\textbf{R}=\overrightarrow{PQ}, \textbf{R}^*=\overrightarrow{PQ^*}\),\(\textbf{R}\cdot\textbf{R}^*\)可解释为:线段\(PQ^*\)在线段\(PQ\)上的射影\(r^*cos\,\theta\)和该线段长的乘积; 外积\(\textbf{R}\times \textbf{R}^*\)只不过是有向三角形\(PQQ^*\)的面积的两倍(\(\textbf{R}\times \textbf{R}^*=rr^*sin\,\theta\))。如下图所示
所以,方向导数
$$
=\text{grad}f \cdot \vec{l^{\circ}}=|\text{grad}f|\cdot|\vec{l^{\circ}}|\cdot \cos \theta
$$
由于单位向量的模\(|\vec{l^{\circ}}|\)恒等于\(1\),所以
$$
=\text{grad}f \cdot \vec{l^{\circ}}=|\text{grad}f|\cdot \cos \theta
$$
当\(\theta=0\)时,即\(\vec{l}\)与方向向量\(\Big\{\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}\Big\}\)方向相同时,方向导数取到最大值。
$$
\frac{\partial f}{\partial l} = |\text{grad}f|\cdot \cos 0 = |\text{grad}f|
$$
因此向量\(\Big\{\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}\Big\}\)是使函数在一点的方向导数达到最大值的方向。它也是函数在一点的增加最快的方向。我们称该向量是二元函数\(z=f(x,y)\)在点\((x,y)\)处的梯度向量,简称梯度(Gradient ),记作
$$
\text{grad}f = \Big\{\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}\Big\}=\frac{\partial f}{\partial x}i+\frac{\partial f}{\partial y}j = \bigtriangledown f
$$
梯度是一个向量,它是函数\(z=f (x,y)\)在点\((x,y)\)处取得最大方向导数的方向。梯度向量在任何点都垂直于函数的等值线。
梯度下降方法基于以下的观察:如果实值函数\(F(x)\)在点\(a\)处可微且有定义,那么函数\(F(x)\)在\(a\)点沿着梯度相反的方向\(-\bigtriangledown F(a)\)下降最多。它可以表示为:
$$
X_{n+1}=X_n - \gamma_n \bigtriangledown F(x_n), n \geq 0
$$
对于二元函数,梯度下降可以表示为:
$$
(x_{n+1}, y_{n+1})=(x_n, y_n) - \gamma \times \bigtriangledown f(x_n, y_n)
$$
相应的,梯度上升可表示为:
$$
(x_{n+1}, y_{n+1})=(x_n, y_n) + \gamma \times \bigtriangledown f(x_n, y_n)
$$
对于梯度上升或下降,选择合适的迭代步长和迭代次数也很重要。
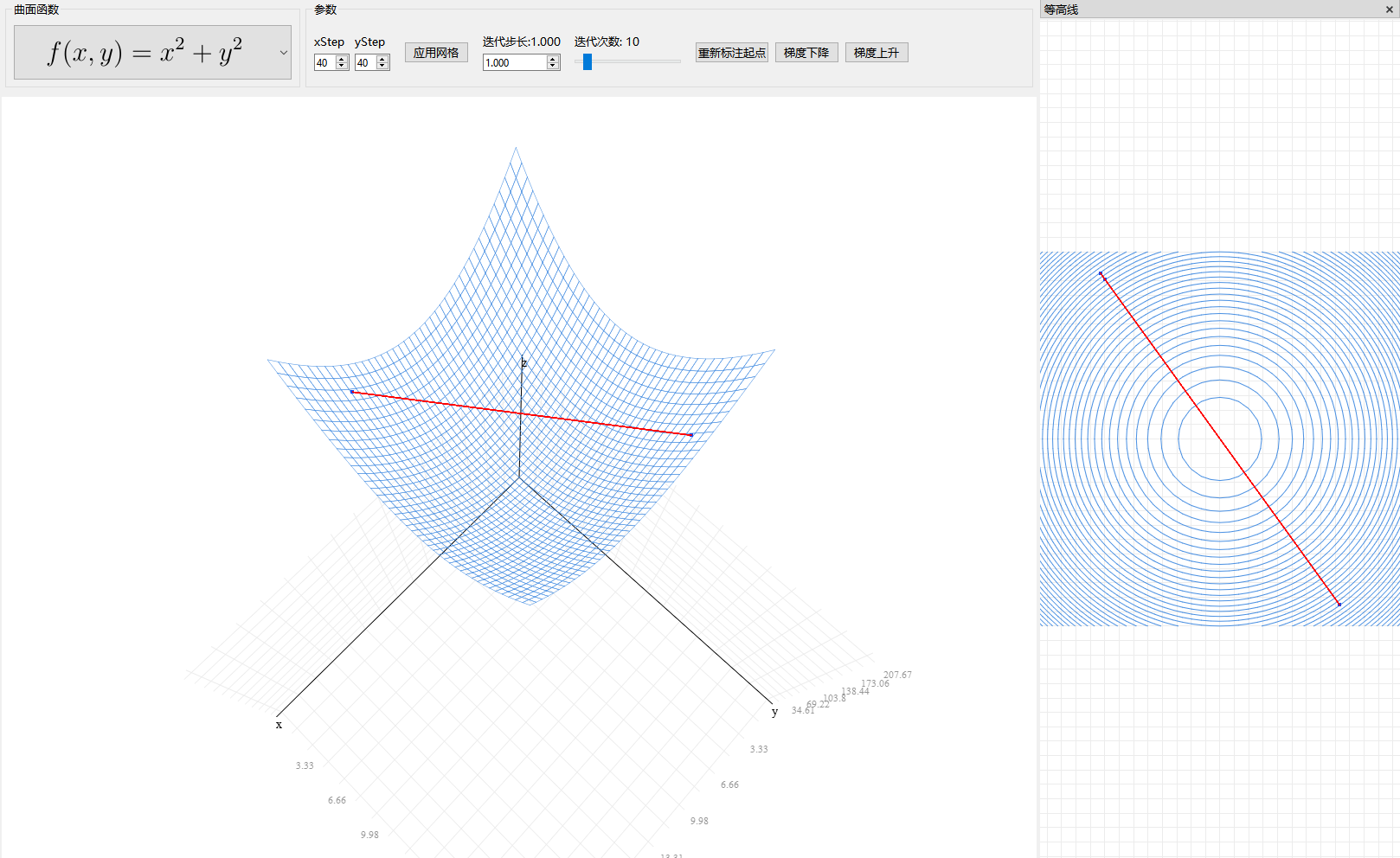
- 当迭代步长选择过大时,梯度下降在不同的点之间来回震荡。如下图
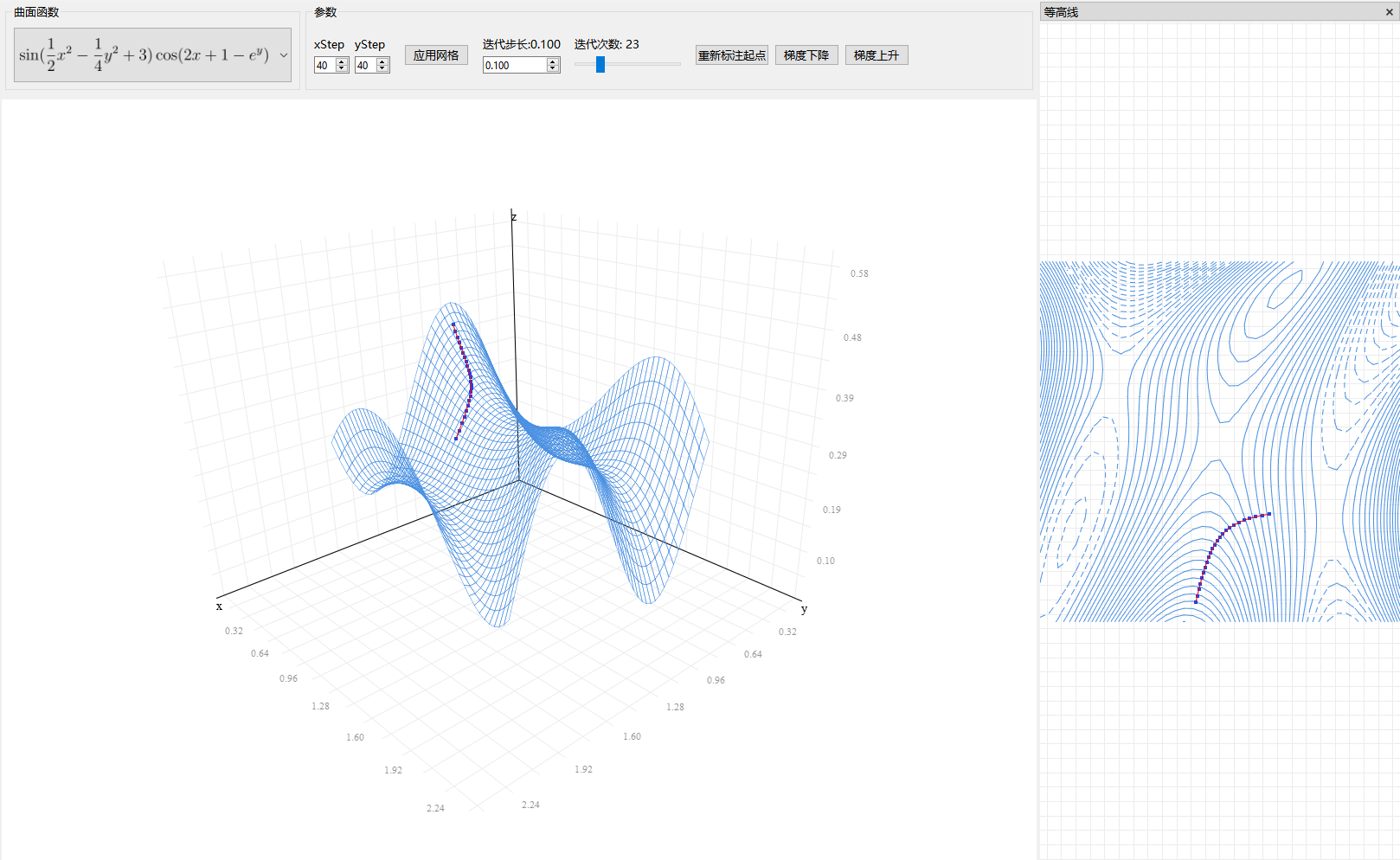
Qklabs通过对一些函数求偏导数和梯度向量,使用OpenGL展示了梯度上升或下降的过程,它可以设置迭代次数和迭代步长,通过标注梯度起始点,形象的展示了梯度上升/下降的过程。
$$
f(x,y) = \frac{x}{x^2+y^2+2}
$$
使用商的导数的法则:
$$
\varphi(x)=\frac{f(x)}{g(x)}
$$
$$
\varphi'(x)=\frac{g(x)f'(x)-g\,'(x)f(x)}{[g(x)]^2}
$$
令\(u=f(x)=x,v=g(x)=x^2+y^2+2\)得:
$$
\frac{\partial f}{\partial x}=\frac{v\cdot \frac{\partial u}{\partial x} - u\cdot \frac{\partial v}{\partial x}}{(x^2+y^2+2)^2}
$$
$$
=\frac{(x^2+y^2+2) - x\cdot 2x}{(x^2+y^2+2)^2}=\frac{-x^2+y^2+2}{(x^2+y^2+2)^2}
$$
$$
\frac{\partial f}{\partial y}=\frac{v\cdot \frac{\partial u}{\partial y} - u\cdot \frac{\partial v}{\partial y}}{(x^2+y^2+2)^2}
$$
$$
=\frac{0 - x\cdot 2y}{(x^2+y^2+2)^2}=\frac{-2xy}{(x^2+y^2+2)^2}
$$
$$
f(x,y)=e^{-x^2}e^y
$$
求偏导导数,利用导数乘积法则:
$$
\varphi (x)= f(x)g(x) \implies \varphi'(x)=f(x)g\,'(x) + g(x)f'(x)
$$
令\(f(x)=e^{-x^2}, g(x)=e^y\),那么
$$
\frac{\partial \varphi}{\partial x} = e^{-x^2}\cdot \frac{\partial g}{\partial x} + e^y\cdot \frac{\partial f}{\partial x}
$$
$$
=e^{-x^2}\cdot 0 + e^y \cdot \frac{\partial}{\partial x}(e^{-x^2})
$$
令\(u=-x^2\),利用链式法则,可得
$$
\frac{\partial}{\partial x}(e^{-x^2}) = e^u \cdot \frac{du}{dx} = -2xe^{-x^2}
$$
故
$$
\frac{\partial f}{\partial x} = e^y \cdot -2xe^{-x^2} = -2xe^{y-x^2}
$$
$$
\frac{\partial f}{\partial y} = e^{-x^2}\cdot \frac{\partial g}{\partial y} + e^y\cdot \frac{\partial f}{\partial y}
$$
$$
=e^{-x^2}\cdot e^y + e^y\cdot 0 = e^{y-x^2}
$$
$$
f(x,y)=\sin(\frac{1}{2}x^2-\frac{1}{4}y^2+3)\cos(2x+1-e^y)
$$
利用导数乘法法则:令\(u=\frac{1}{2}x^2-\frac{1}{4}y^2+3, v = 2x+1-e^y\),得:
$$
f(x,y)=\sin u \cos v
$$
令\(\varphi(x)=\sin u, g(x)=\cos v\),那么
$$
\frac{\partial f}{\partial x} = \sin u \cdot \frac{\partial g}{\partial x} + \cos v \cdot \frac{\partial \varphi}{\partial x}
$$
$$
=\sin u \cdot (-\sin v) \cdot 2 + \cos v \cdot \cos u \cdot x
$$
$$
=-2 \sin(\frac{1}{2}x^2-\frac{1}{4}y^2+3) \sin (2x+1-e^y) + x\cos(\frac{1}{2}x^2-\frac{1}{4}y^2+3)\cos(2x+1-e^y)
$$
$$
\frac{\partial f}{\partial y} = \sin u \cdot \frac{\partial g}{\partial y} + \cos v \cdot \frac{\partial \varphi}{\partial y}
$$
$$
=\sin u \cdot (-\sin v) \cdot (-e^y) + \cos v \cdot \cos u \cdot (-\frac{1}{2}y)
$$
$$
=e^y \sin(\frac{1}{2}x^2-\frac{1}{4}y^2+3) \sin (2x+1-e^y) - \frac{1}{2} y\cos(\frac{1}{2}x^2-\frac{1}{4}y^2+3)\cos(2x+1-e^y)
$$
关于上述算法的源代代码和演示程序,请访问Qklabs
更多文章,请访问趣宽科技